Stappenplan: Het in elkaarzetten van de Robot
Hier onder de stappen om de Robot te monteren, alvorens we aan de slag gaan met het Programmeren.
Volg de stappen en de uitleg om problemen tijdens het maken van de robot te voorkomen.
Stap 1
Zorg er voor dat de draden aan motoren gesoldeerd zijn met eventueel een
ontstoring condensator van 100nF (104) over de plus en de min aansluiting van de motor.
Gebruik niet de al te dunne draad om de motoren met de besturing-print te verbinden,
daar de aansluiting gaat met een klem/schroef verbinding.
Vergeet ook niet de draden te vertinnen voor de aansluiting, of deze te voorzien van
aansluit lipjes.

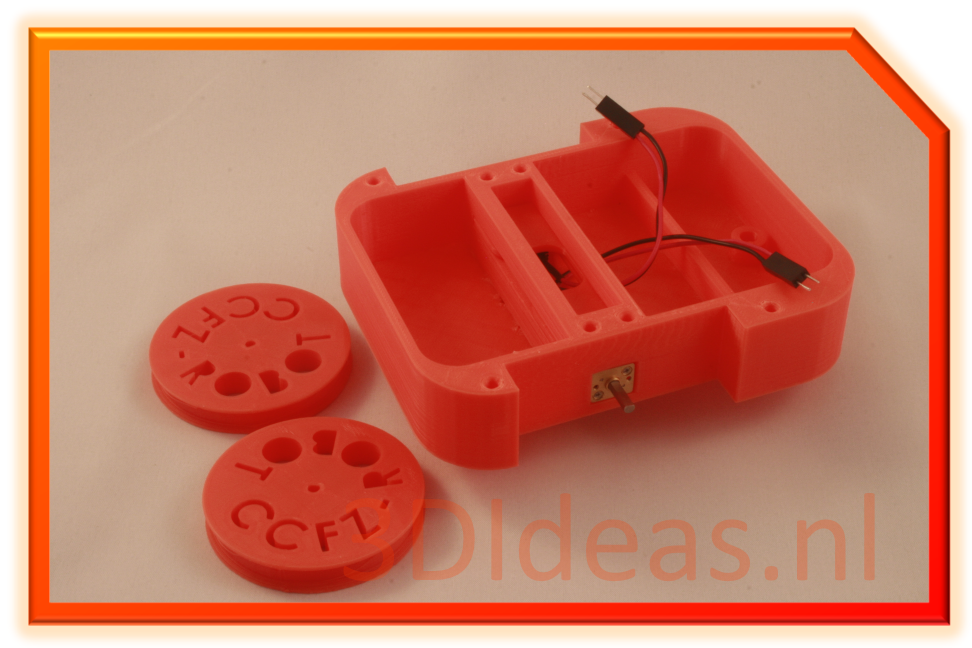
Stap 2
Plaats de motoren in de motor “slots” en geleid de aansluit draden
door de onderste opening door naar de achterkant van de robot.
( Let op de bovenste brede opening wordt gebruikt bij de volgende stap dus deze niet gebruiken )
Plaats daarna de twee kleine motor plaatjes over de motor(en) heen.
Zorg er voor dat de Gladde onderkant boven komt, en dat de twee rondingen van de plaatjes precies over de
afgeronde hoeken van de motoren passen. We hebben nu als het goed is een glad geheel waar over straks het
motor slot heen kan vallen. Zodat de motoren stevig vast geklemd zitten.

Stap 3
Nu kan het motor slot beide motoren vast gaan klemmen.
Gebruik de motor schuif door deze met de lip omhoog van uit de
achterkant van de robot over de motoren heen de schuiven.
Zorg er voor dat de motor plaatjes uit stap 2 niet van hun plaats verschuiven,
anders zal het geheel niet goed klem vast komen te zitten.
Zodra de motor schuif de voorste sleuf tegen komt zal er van boven af op het motor compartiment wat druk uitgeoefend
moeten worden om hem goed klemvast te kunnen zetten.
Druk de motor slot goed door dat deze door beide sleuven valt en het lipje klem zit tegen het motor huis.

Stap 4
De volgende stap worden beide voor wielen geplaatst op de robot. Staat er tekst op de wielen dan zorgen dat je ze niet in spiegelbeeld
op de robot plaatst. Als de tolerantie van de printer goed is zal het wiel klemvast over de as van de motor passen. Let hier bij op dat er een
platte kant zit op de as , deze zit ook op het wiel.
Mocht het wiel nu echt te los zitten kan deze altijd met een druppeltje lijm vastgezet worden.
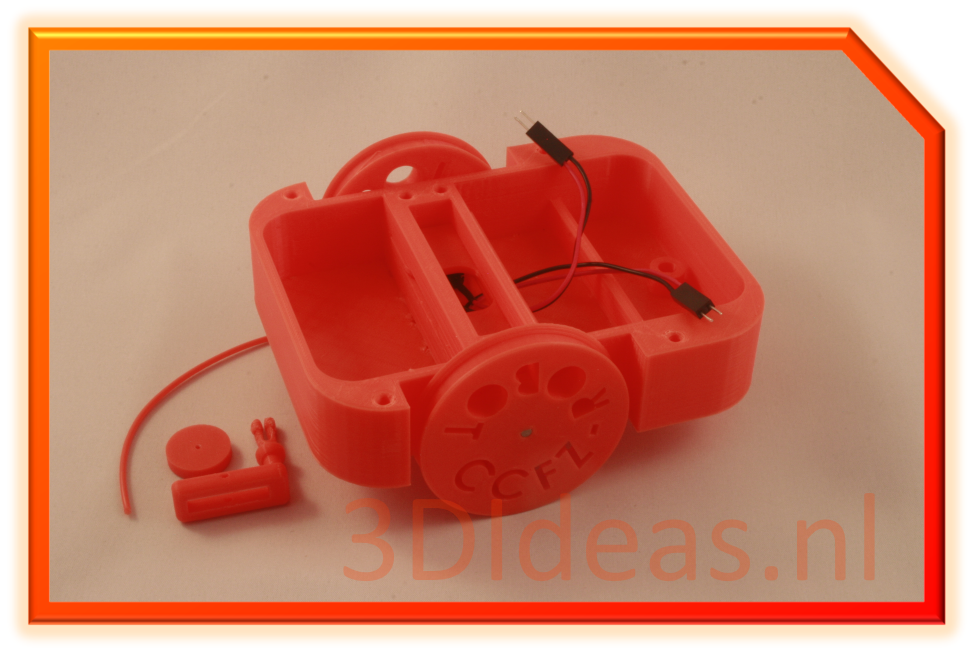
Stap 5
Het achter wiel, dient eerst gemonteerd te worden. Hiervoor heb je een stukje filament van 1.75 nodig welke als as functioneert.
Mocht dit niet voor handen zijn dan kan men ook een paperclip of een spijkertje gebruiken.
Zorg er voor dat eventuele braampjes van het printen bij het achterwiel goed opgeschuurd worden zodat deze vrij kan bewegen
in de wielkast van de achterwiel ophanging. Als het achterwiel goed geschuurd is kunnen we naar de volgende stap.
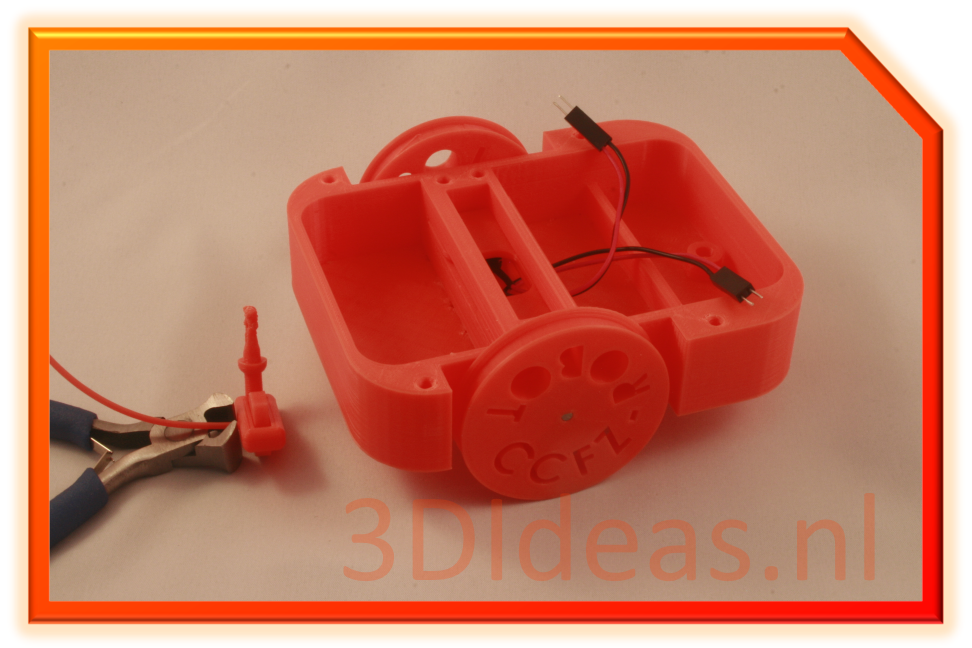
Stap 6
Gebruik het stukje printer filament om deze door de ophanging en het wiel door te voeren.
Kijk of het achterwiel goed soepel kan draaien, anders de ophanging en het wiel nog wat bijwerken door deze licht op te schuren.
Knip daarna het filament op lengte, laat hierbij ongeveer 2 mm aan beide kanten over.
Als dit gebeurt is verwarm je de uiteinden met een soldeerbout of een aansteker ( niet te warm heel kort zodat het filament buigbaar is )
Dan kan je met een schroevendraaier of tangetje het filament een beetje ombuigen ( aan beide kanten ) zodat deze niet meer los kan komen.
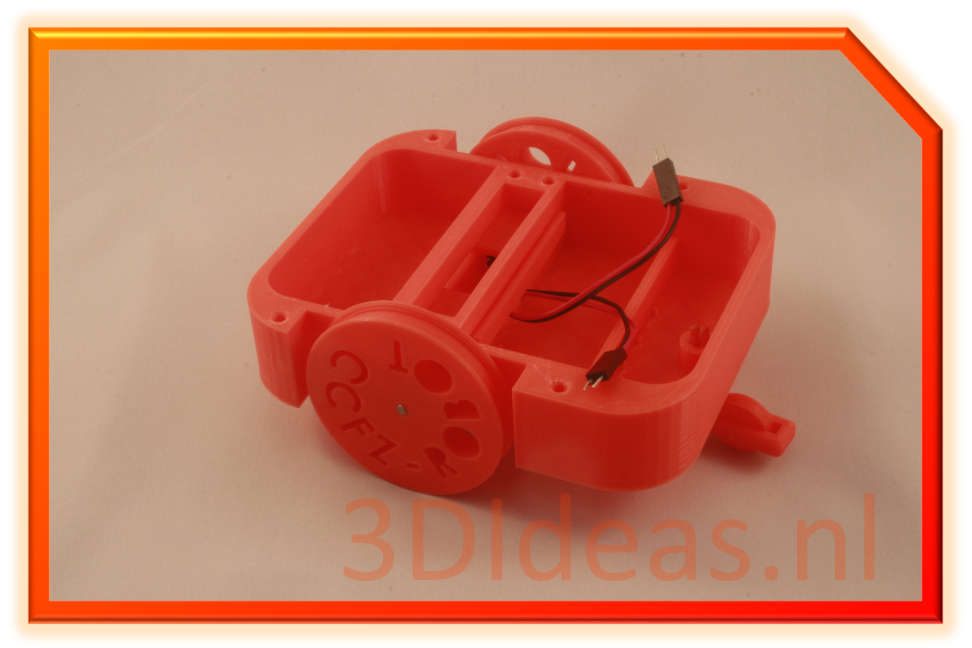
Stap 7
Voor dat we de ophanging plaatsen goed zorgen dat de as goed geschuurd is zodat deze soepel door de bodemplaat
van de robot gaat. En zo gemakkelijk de bochten kan nemen zonder dat het achterwiel klem blijft zitten.
Daarna kan de achterwiel-ophanging geplaatst worden op de robot.
Let op de nieuwste versie van de ophanging heeft een dopje welke boven op de as geplaatst kan worden,
Zit deze ook weer niet goed klem vast door tolerantie problemen van de print kan ook hier een druppeltje lijm uitkomst bieden.
Stap 8
De Ping sensoren Monteren.
Alvorens we de sensoren in de houder plaatsen deze eerst goed aan de binnenkant opschuren voornamelijk aan de boven kant
kan er wat extra materiaal zitten door het printen welke het gat niet perfect rond maakt.
Schuur het gat netjes op en probeer voorzichtig de sensor in de gaten te plaatsen, let hier bij op dat de aansluit pinnen naar beneden wijzen.
Past de sensor niet goed dan het gat nog iets ruimer maken. Let op niet te veel in een keer zodat de sensoren te los komen te zitten.
Passen beide sensoren goed dan gaan we de montage pinnen GOED!! schuren. Deze dienen bijna glad te worden, zodat de print lagen niet
meer met je nagel te voelen zijn. Enige print problemen komen dan ook naar voren ( omdat de pinnen klein zijn kunnen sommige printers hier
wat moeite mee hebben ) waardoor ze breken. Dit kan beter tijdens het schuren gebeuren dan bij het plaatsen op de robot.
( Mocht dit toch gebeuren dan kan men met een metalen pin het achterblijvende deel via de onderkant er weer uit duwen )

Stap 9
Zijn de pinnen goed glad dan kan de sensor-bar geplaatst worden op de voorkant van de robot. Twee pinnen
kunnen door de gaatjes van de sensor houder gedrukt worden in het chassis van de robot. Deze goed aandrukken zodat de
sensoren recht naar voren kijken en de houder goed vast zit
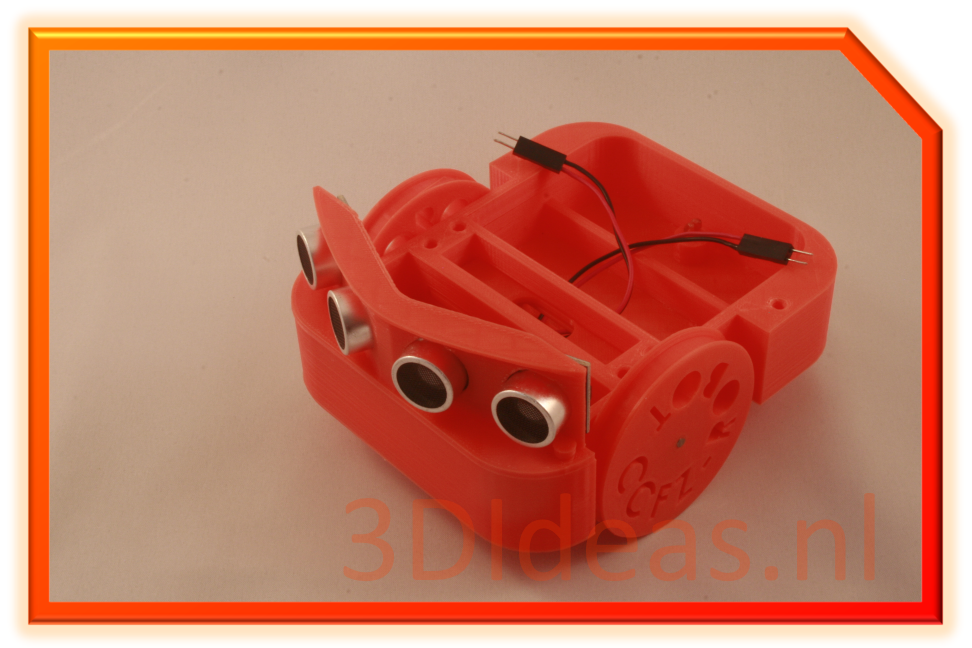
Stap 10
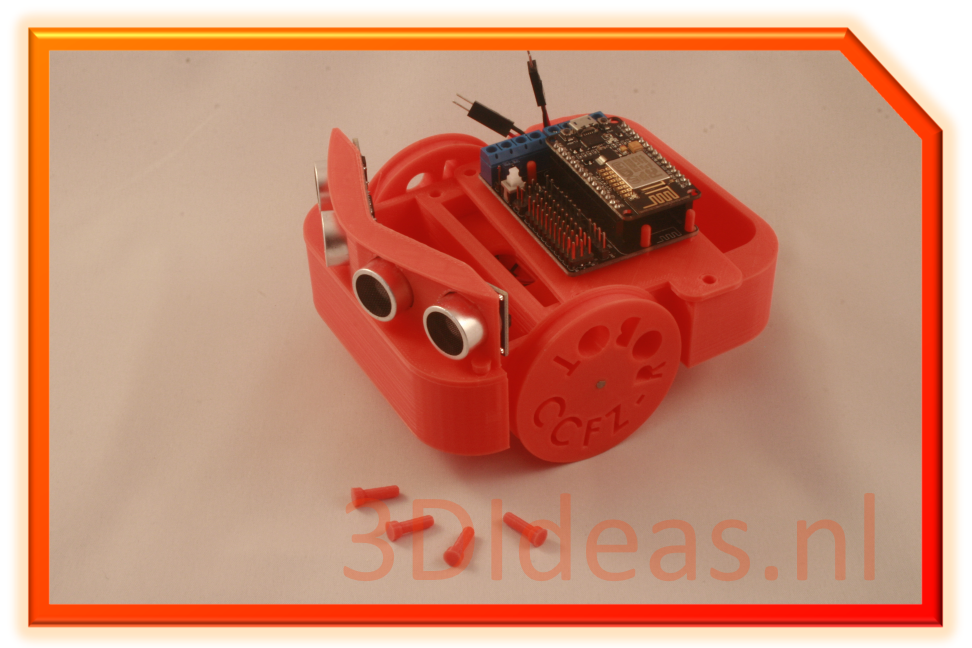
De motor en processor print houder Monteren.
Plaats als eerste de Motor stuur print op de kunststof houder, let op past maar op een manier er op. De opening voor de draden van de motor zitten aan de kant
met de blauwe schroef connectoren. Als de motor print geplaatst is kan de processor print er opgezet worden.
Let op dit alleen doen als de robot niet is aangesloten op de batterij of verbonden is met de usb kabel !!!!
Let bij het plaatsen van de print op dat deze op de juiste manier geplaats is. Op de motor stuur print staat een antenne symbool welke de richting
van de antenne van de esp-processor chip aangeeft.
Naast de motor en processor print is er ook een versie met twee kleine printjes voor de conversie van 5 naar 3.3 V en omgekeerd. ( dit wordt in de elektrische aansluiting verder beschreven )

Stap 11
Vervolgens de print vastzetten met de pinnen zoals bij de ping sensoren. Ook hier weer eerst de pinnen goed schuren !!!
Stap 12
De laatste stap is het aanbrengen van de silicone ringen welke voor de grip zorgen als de robot gaat rijden.
Hoe deze ringen te maken wordt in een aparte handleiding besproken. Men kan hier voor ook bijvoorbeeld meerdere elastiekjes gebruiken
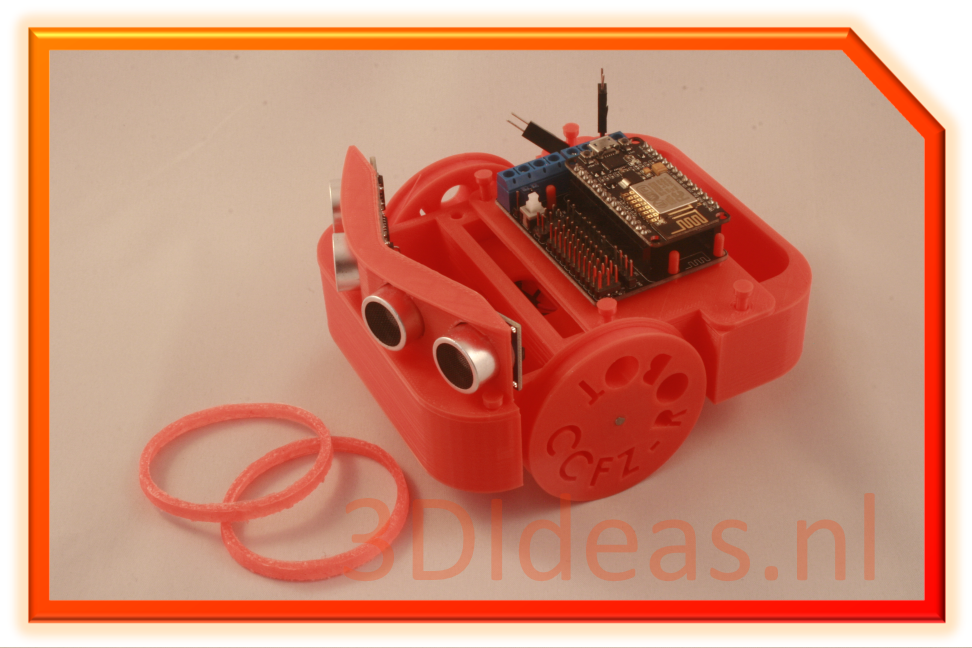
Stap 13
De robot mechanisch klaar !
De volgende handleiding is het aansluiten van de elektronica , motoren en batterij
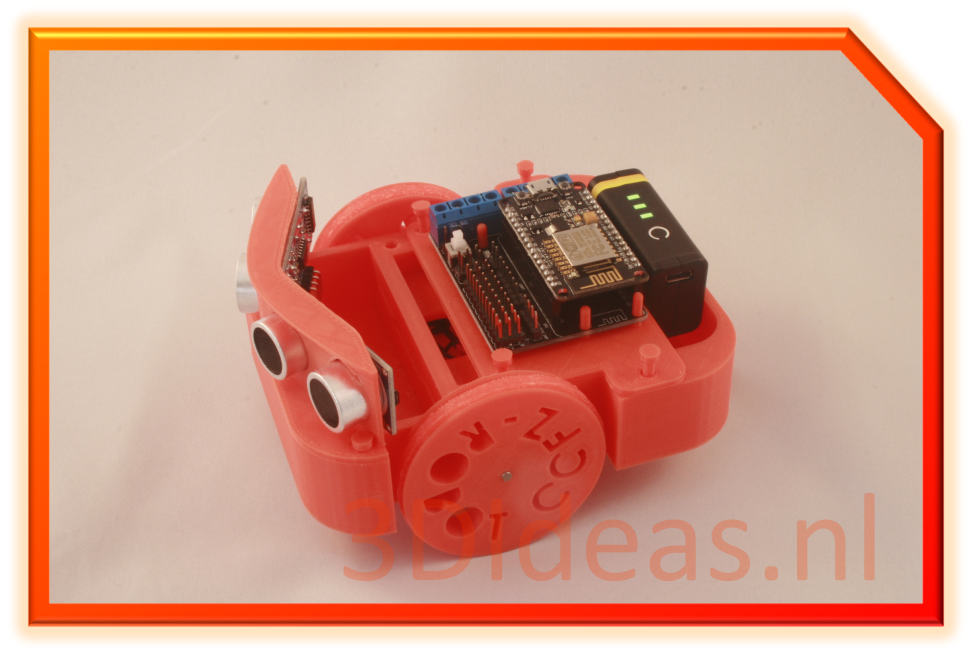
- Vervolg: Handleiding starterkit elektronica