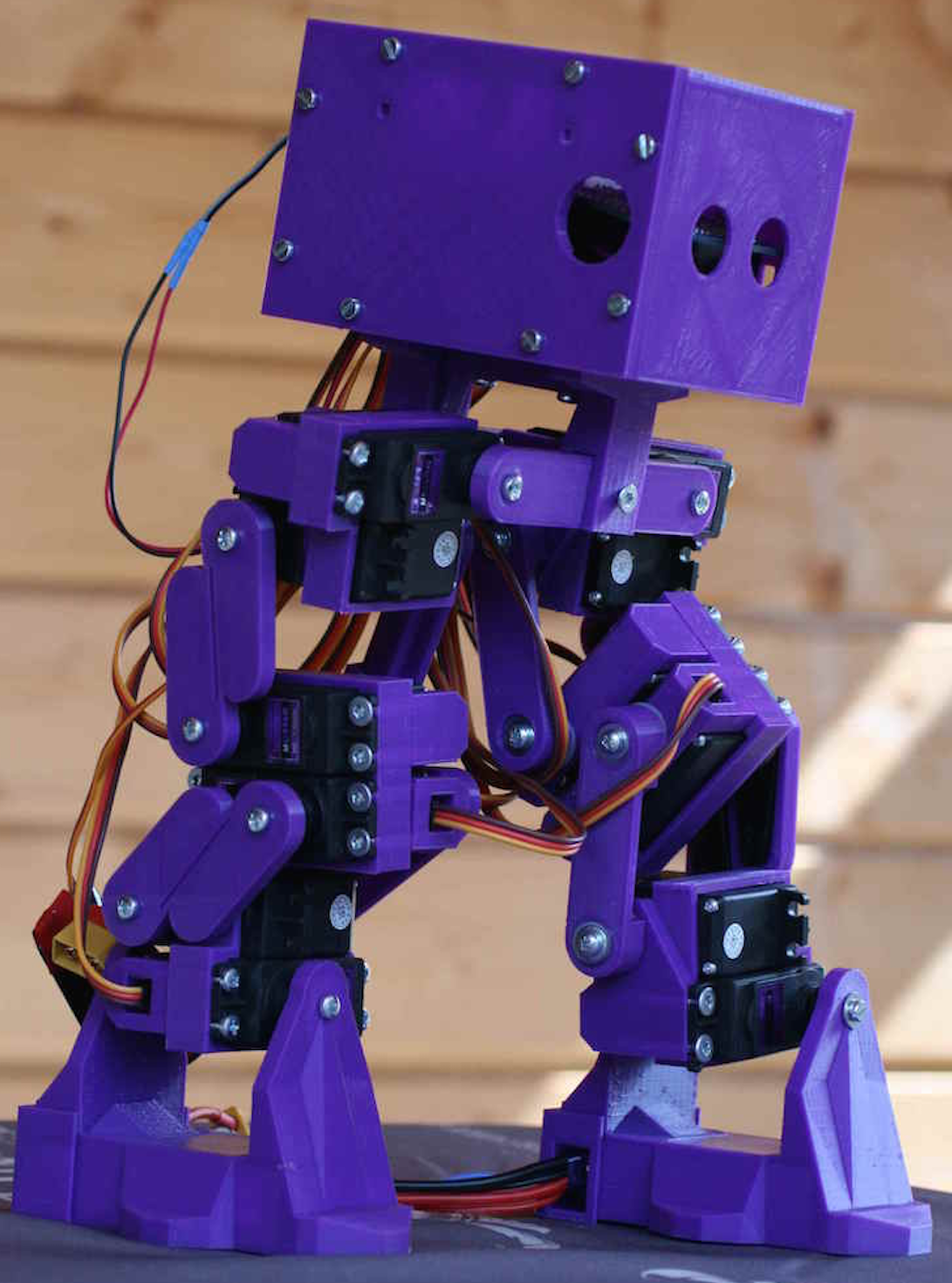
 ROFI is the fifth prototype from Project Biped. It is a self-contained, bipedal robot that uses accelerometer feedback to balance. It has 12 DOF (degrees of freedom) and can walk around while avoiding obstacles using an ultrasonic range sensor. A small Android tablet in ROFI’s head provides the brains and an Arduino Mega provides the hardware interface. All of the designs, instructions, source code, and parts lists are provided for free. ROFI was designed to be easily made
ROFI is the fifth prototype from Project Biped. It is a self-contained, bipedal robot that uses accelerometer feedback to balance. It has 12 DOF (degrees of freedom) and can walk around while avoiding obstacles using an ultrasonic range sensor. A small Android tablet in ROFI’s head provides the brains and an Arduino Mega provides the hardware interface. All of the designs, instructions, source code, and parts lists are provided for free. ROFI was designed to be easily made